ラグランジュ形式による解析力学の定式化では、まず、力学変数 \(q(t)\) で記述される系固有のラグランジアン \(L(q(t),\dot{q}(t),t)\) を導入する必要があります。
最小作用の原理により、このラグランジアンを時間について積分して作られる作用
\begin{align}
S[q]=\int_{t_1}^{t_2}dt L(q(t),\dot{q}(t),t)
\end{align}
の変分がゼロになる(\(\delta S[q]=0\) を満たす)ような \(q(t)\) が、実現される系の時間発展になります。
しかし、実際問題として、どのようにラグランジアンを選べば良いのでしょうか?
この記事では、対称性を原理とすることで、ラグランジアンの形を制限できるということを説明します。
目次
ラグランジアンの任意性
対称性によるラグランジアンの制限の話に入る前に、ラグランジアンの任意性について説明します。
ラグランジアンの任意性
ラグランジアン \(L(q(t),\dot{q}(t),t)\) と、それに時間 \(t\) についての全微分項を加えたラグランジアン
\begin{align}
L'(q(t),\dot{q}(t),t)
=L(q(t),\dot{q}(t),t)+\frac{d}{dt}F(q(t),t)
\end{align}
は、最小作用の原理により、どちらも同じ Euler-Lagrange 方程式を導きます。
ここで、\(F(q(t),t)\) は任意関数です。
つまり、同じ運動方程式を導くという意味で、\(L(q(t),\dot{q}(t),t)\) と \(L'(q(t),\dot{q}(t),t)\) は等価です。
証明はこちら
ラグランジアンの任意性の証明(クリックで開きます)
\(L'(q(t),\dot{q}(t),t)\) の作用 \(S'[q]\) を考えると、
\begin{align}
S'[q]
=&\int_{t_1}^{t_2}dt L'(q(t),\dot{q}(t),t)\notag\\
=&\int_{t_1}^{t_2}dt \left[L(q(t),\dot{q}(t),t)+\frac{d}{dt}F(q(t),t)\right]\notag\\
=&S[q]+F(q(t_2),t_2)-F(q(t_1),t_1)
\label{Scal}
\end{align}
となります。
最小作用の原理で \(q(t)\) の変分を考えるとき、時間の端点 \(t=t_1, t_2\) における \(q(t)\) の値は固定されています。
\begin{align}
\delta q(t_1)=\delta q(t_2)=0.
\end{align}
よって、\eqref{Scal} の3 つ目の等号の第 2 項と第 3 項は作用の変分でゼロとなり、
\begin{align}
\delta S'[q]
=&\delta S[q]
\end{align}
が得られます。
したがって、最小作用の原理(\(\delta S'[q]=\delta S[q]=0\))から得られる Euler-Lagrange 方程式は同じになります。
この事実はこれから必要になりますので、ここできちんと理解しておきましょう
対称性によるラグランジアンの形の制限
時間並進対称性
力学変数 \(q(t)=(q_1(t),q_2(t),\dots,q_N(t))\) で記述される \(N\) 自由度系を考えます。
この系に対して時間並進と呼ばれる変換を施します。
時間並進
時間 \(t\) を定数 \(t_0\) だけずらす変換
\begin{align}
t\to t+t_0\qquad(t_0=\mathrm{const.})
\end{align}
を時間並進と言います。
系が時間並進対称性を持っているとは、
\(q(t)\) が Euler-Lagrange 方程式の解ならば、\(q(t+t_0)\) も Euler-Lagrange 方程式の解である
ということを意味します。
では、系に時間並進対称性を課すことで、ラグランジアンがどのように制限されるのかを見ていきます。
まず、\(q(t)\) が Euler-Lagrange 方程式の解であると仮定します。
\begin{align}
\frac{d}{dt}\frac{\partial L(q(t),\dot{q}(t),t)}{\partial \dot{q}_i(t)}-\frac{\partial L(q(t),\dot{q}(t),t)}{\partial q_i(t)}=0\qquad(i=1,2,\dots,N).
\end{align}
これに対して、時間並進 \(t\to t+t_0\) を考えます。
\begin{align}
\frac{d}{d(t+t_0)}\frac{\partial L(q(t+t_0),\dot{q}(t+t_0),t+t_0)}{\partial \dot{q}_i(t+t_0)}-\frac{\partial L(q(t+t_0),\dot{q}(t+t_0),t+t_0)}{\partial q_i(t+t_0)}=0\qquad(i=1,2,\dots,N).
\end{align}
\(t\) を \(t+t_0\) に置き換えただけです
微分演算子 \(d/d(t+t_0)\) は、
\begin{align}
\frac{d}{d(t+t_0)}
=&\frac{dt}{d(t+t_0)}\frac{d}{dt}\notag\\
=&\frac{1}{\frac{d(t+t_0)}{dt}}\frac{d}{dt}\notag\\
=&\frac{1}{1}\frac{d}{dt}\notag\\
=&\frac{d}{dt}
\end{align}
と変形できます。
よって、
\begin{align}
\frac{d}{dt}\frac{\partial L(q(t+t_0),\dot{q}(t+t_0),t+t_0)}{\partial \dot{q}_i(t+t_0)}-\frac{\partial L(q(t+t_0),\dot{q}(t+t_0),t+t_0)}{\partial q_i(t+t_0)}=0\qquad(i=1,2,\dots,N).
\end{align}
が得られます。
系が時間並進対称性をもつ、つまり、\(q(t+t_0)\) がこの Euler-Lagrange 方程式を満たすには、
\begin{align}
L=L(q(t),\dot{q}(t))
\end{align}
であれば良いことがわかります。
一般の系に対しては、ラグランジアンは陽な時間依存性をもちますが、すなわち、\(L=L(q(t),\dot{q}(t),t)\) ですが、
時間並進対称性をもつ系のラグランジアンは陽な時間依存性をもたないです
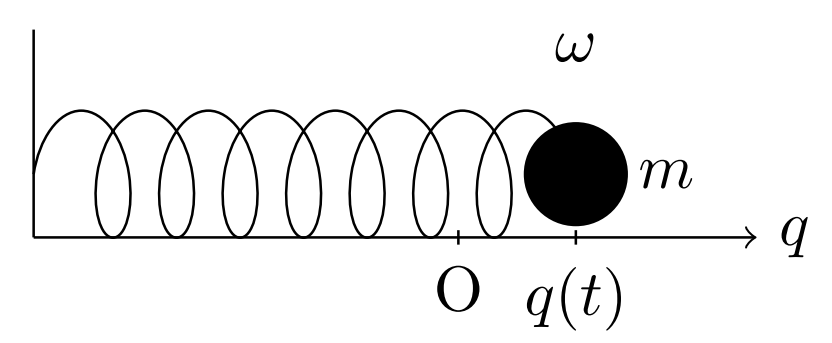
一般論を説明したので、具体例として、質量 \(m\)、振動数 \(\omega\) をもつ 1 次元調和振動子を考えます。
 1 次元調和振動子
1 次元調和振動子
平衡位置からの変位を \(q(t)\) とすると、ラグランジアンは、
\begin{align}
L(q(t),\dot{q}(t))=\frac{1}{2}m\dot{q}(t)^2-\frac{1}{2}m\omega^2q(t)^2
\end{align}
とかけます。
このラグランジアンは陽な時間依存性をもたないので、この系は時間並進対称性をもちます。
どの時刻で考えるかで振動の様子が変わらないことから直感的に理解できます!
この系にさらに、外力 \(f(t)\) を加えた系を考えてみます。
このとき、外力が系にする仕事がラグランジアンに加わり、ラグランジアンは、
\begin{align}
L(q(t),\dot{q}(t),t)=\frac{1}{2}m\dot{q}(t)^2-\frac{1}{2}m\omega^2q(t)^2+f(t)q(t)
\end{align}
となります。
このラグランジアンは陽な時間依存性をもつので、この系は時間並進に対する対称性がありません。
直感的には、理想的なバネの系において、誰かがバネを引っ張る(外力を加える)と運動の様子が変わりますね
空間並進対称性
3 次元空間における \(N\) 質点系を考えます。
\(N\) 個の質点の位置ベクトルを \(\boldsymbol{r}_{i}(t)\) (\(i=1,2,\dots,N\)) とかくことにします。
この系における力学変数 \(q(t)\) は \(q(t)=(\boldsymbol{r}_{1}(t),\boldsymbol{r}_{2}(t),\dots,\boldsymbol{r}_{N}(t))\) で、各位置ベクトルが 3 成分をもつので、力学変数の数は \(3N\) 個になります。
よって、3 次元空間における \(N\) 質点系は \(3N\) 自由度系です。
では、空間並進について考えましょう。
「一様に」とは、座標に依らずに空間全体を同じだけずらすということです
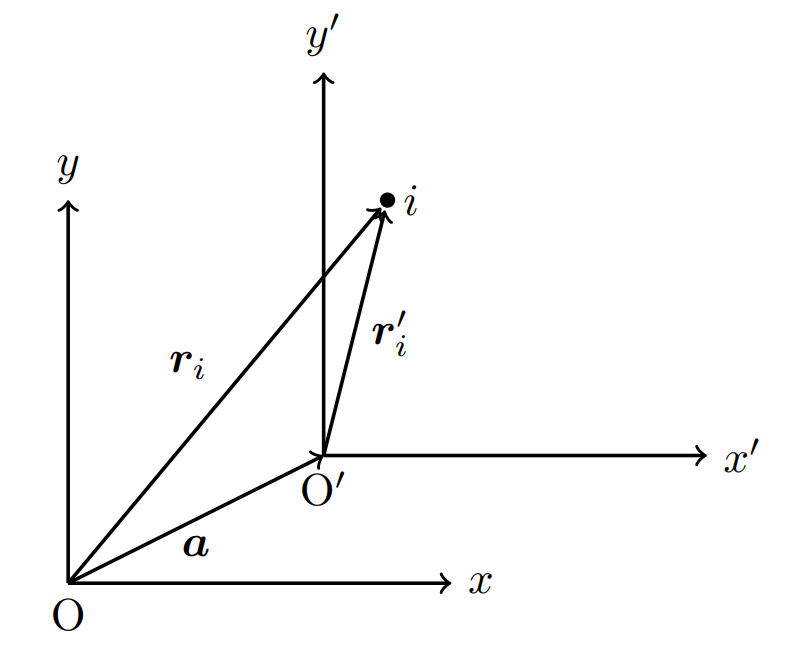
簡単のため、図では 2 次元空間(平面)を考えることにします。
空間並進
今、\(i\) 番目の質点に注目しましょう。
空間並進前の座標系を \(\mathrm{O}\) 系、並進後の座標系を \(\mathrm{O}’\) 系として、各座標系における位置ベクトルをそれぞれ \(\boldsymbol{r}_{i}(t), \boldsymbol{r}’_{i}(t)\) とします。
図からわかるように、これらの位置ベクトルの間の関係は、
\begin{align}
\boldsymbol{r}’_{i}(t)=\boldsymbol{r}_{i}(t)-\boldsymbol{a}
\end{align}
となります。
ここで、\(\boldsymbol{a}\) は任意の定ベクトルで、どの向きにどれだけ空間並進するのかを決定するベクトルです。
今、\(N\) 質点系を考えているので、\(N\) 個の質点の位置がすべて同じだけずれます。
\begin{align}
\boldsymbol{r}_{i}(t)\to\boldsymbol{r}’_{i}(t)=\boldsymbol{r}_{i}(t)-\boldsymbol{a}\qquad(i=1,2,\dots,N).
\end{align}
これが空間並進の変換になります。
ラグランジアン \(L(\boldsymbol{r}_i(t),\dot{\boldsymbol{r}}_i(t),t)\) をもつ \(N\) 質点系が空間並進対称性をもつとは、空間並進の変換によって、ラグランジアンが
\begin{align}
L(\boldsymbol{r}’_i(t),\dot{\boldsymbol{r}}’_i(t),t)=L(\boldsymbol{r}_i(t),\dot{\boldsymbol{r}}_i(t),t)+\frac{d}{dt}F(\boldsymbol{r}_i(t),t)
\end{align}
と変換することを言います。
\(F(\boldsymbol{r}_i(t),t)\) は任意関数です。
ラグランジアンは正確には次のような意味ですが、ここでは略記しました
\begin{align}
L=L(\boldsymbol{r}_1(t),\boldsymbol{r}_2(t),\dots,\boldsymbol{r}_N(t),\dot{\boldsymbol{r}}_1(t),\dot{\boldsymbol{r}}_2(t),\dots,\dot{\boldsymbol{r}}_N(t),t).
\end{align}
任意の並進ベクトル \(\boldsymbol{a}\) を用いると、空間並進後のラグランジアンは、
\begin{align}
L(\boldsymbol{r}_i(t)-\boldsymbol{a},\dot{\boldsymbol{r}}_i(t),t)=L(\boldsymbol{r}_i(t),\dot{\boldsymbol{r}}_i(t),t)+\frac{d}{dt}F(\boldsymbol{r}_i(t),t;\boldsymbol{a})
\label{spacetrans}
\end{align}
ともかけます。
ここで、\(\boldsymbol{a}\) が定ベクトルなので、
\begin{align}
\dot{\boldsymbol{r}}’_i(t)
=&\frac{d}{dt}\boldsymbol{r}’_i(t)\notag\\
=&\frac{d}{dt}(\boldsymbol{r}_{i}(t)-\boldsymbol{a})\notag\\
=&\dot{\boldsymbol{r}}_i(t)
\end{align}
となることを用いました。
実際に、空間並進に対してラグランジアンが \eqref{spacetrans} のように変換するならば、\(\boldsymbol{r}_i(t)\) が Euler-Lagrange 方程式の解のとき、\(\boldsymbol{r}’_i(t)=\boldsymbol{r}_i(t)-\boldsymbol{a}\) も解となることが示せます。
まず、\(\boldsymbol{r}_i(t)\) が Euler-Lagrange 方程式の解なので、
\begin{align}
\frac{d}{dt}\frac{\partial L(\boldsymbol{r}_i(t),\dot{\boldsymbol{r}}_i(t),t)}{\partial \dot{\boldsymbol{r}}_j(t)}-\frac{\partial L(\boldsymbol{r}_i(t),\dot{\boldsymbol{r}}_i(t),t)}{\partial \boldsymbol{r}_j(t)}=0\qquad(j=1,2,\dots,N)
\end{align}
を満たします。
空間並進に対してラグランジアンが \eqref{spacetrans} のように変換することと、ラグランジアンに時間についての全微分項を加えても Euler-Lagrange 方程式が変わらないことを用いると、
\begin{align}
\frac{d}{dt}\frac{\partial L(\boldsymbol{r}’_i(t),\dot{\boldsymbol{r}}’_i(t),t)}{\partial \dot{\boldsymbol{r}}_j(t)}-\frac{\partial L(\boldsymbol{r}’_i(t),\dot{\boldsymbol{r}}’_i(t),t)}{\partial \boldsymbol{r}_j(t)}=0\qquad(j=1,2,\dots,N)
\label{eq1}
\end{align}
となります。
微分演算子は、次のように変形できます。
\begin{align}
\frac{\partial}{\partial \boldsymbol{r}_j(t)}
=&\frac{\partial}{\partial \boldsymbol{r}’_j(t)},\notag\\
\frac{\partial}{\partial \dot{\boldsymbol{r}}_j(t)}
=&\frac{\partial}{\partial \dot{\boldsymbol{r}}’_j(t)}.
\label{ope}
\end{align}
この計算はこちら
微分演算子の変形(クリックで開きます)
この計算においては、\(\boldsymbol{r}=(x_1,x_2,x_3)=\boldsymbol{e}_ix_i\) (\(i=1,2,3\)) とします。
このとき、空間並進後の位置ベクトルは、\(\boldsymbol{r}’=\boldsymbol{e}_ix’_i=\boldsymbol{e}_i(x_i-a_i)\) となります。
微分演算子の変換は、成分でかくと、
\begin{align}
\frac{\partial}{\partial x_i}
=&\frac{\partial x’_j}{\partial x_i}\frac{\partial}{\partial x’_j}\notag\\
=&\frac{\partial (x_j-a_j)}{\partial x_i}\frac{\partial}{\partial x’_j}\notag\\
=&\delta_{ij}\frac{\partial}{\partial x’_j}\notag\\
=&\frac{\partial}{\partial x’_i}
\end{align}
となります。
ベクトル表記では、
\begin{align}
\frac{\partial}{\partial \boldsymbol{r}}
=&\frac{\partial}{\partial \boldsymbol{r}’}
\end{align}
とかけます。
同様にして、(あるいは、\(\dot{\boldsymbol{r}}’=\dot{\boldsymbol{r}}\)から直ちに)
\begin{align}
\frac{\partial}{\partial \dot{\boldsymbol{r}}}
=&\frac{\partial}{\partial \dot{\boldsymbol{r}}’}
\end{align}
が得られます。
この関係が \(N\) 個の同様の演算子について成り立つので、\eqref{ope} が示されます。
\eqref{ope} を \eqref{eq1} に代入すると、
\begin{align}
\frac{d}{dt}\frac{\partial L(\boldsymbol{r}’_i(t),\dot{\boldsymbol{r}}’_i(t),t)}{\partial \dot{\boldsymbol{r}}’_j(t)}-\frac{\partial L(\boldsymbol{r}’_i(t),\dot{\boldsymbol{r}}’_i(t),t)}{\partial \boldsymbol{r}’_j(t)}=0\qquad(j=1,2,\dots,N)
\end{align}
が得られます。
したがって、ラグランジアンが空間並進対称性をもつならば、\(\boldsymbol{r}’_i(t)=\boldsymbol{r}_i(t)-\boldsymbol{a}\) も解となることが示されました。
空間回転対称性
3 次元空間における \(N\) 質点系を考えます。
\(N\) 個の質点の位置ベクトルを \(\boldsymbol{r}_{i}(t)\) (\(i=1,2,\dots,N\)) とかきます。
空間回転
ある点を中心として位置ベクトルを回転させることを空間回転と言います。
原点を中心とした空間回転は、その回転に対応する直交行列 \(R\) を用いて、
\begin{align}
\boldsymbol{r}_{i}(t)\to\boldsymbol{r}’_{i}(t)=R\boldsymbol{r}_{i}(t)
\end{align}
と表されます。
\(R\) は直交行列なので、
\begin{align}
R^TR=RR^T=1
\end{align}
を満たします。
ここで、\(R^T\) は \(R\) の転置行列で、\(1\) は \(3\times 3\) 単位行列です。
ラグランジアン \(L(\boldsymbol{r}_i(t),\dot{\boldsymbol{r}}_i(t),t)\) をもつ \(N\) 質点系が空間回転対称性をもつとは、空間回転の変換によって、ラグランジアンが
\begin{align}
L(\boldsymbol{r}’_i(t),\dot{\boldsymbol{r}}’_i(t),t)=L(\boldsymbol{r}_i(t),\dot{\boldsymbol{r}}_i(t),t)+\frac{d}{dt}F(\boldsymbol{r}_i(t),t)
\end{align}
と変換することを言います。
\(F(\boldsymbol{r}_i(t),t)\) は任意関数です。
系が空間回転対称性を満たすとき、空間が等方的であると言います
任意の直交行列 \(R\) を用いると、空間回転後のラグランジアンは、
\begin{align}
L(R\boldsymbol{r}_i(t),R\dot{\boldsymbol{r}}_i(t),t)=L(\boldsymbol{r}_i(t),\dot{\boldsymbol{r}}_i(t),t)+\frac{d}{dt}F(\boldsymbol{r}_i(t),t;R)
\label{spacerot}
\end{align}
ともかけます。
実際に、空間回転に対してラグランジアンが \eqref{spacerot} のように変換するならば、\(\boldsymbol{r}_i(t)\) が Euler-Lagrange 方程式の解のとき、\(\boldsymbol{r}’_i(t)=R\boldsymbol{r}_i(t)\) も解となることが示せます。
では、系が空間回転対称性をもつとき、そのラグランジアンはどのように制限されるでしょうか。
空間回転が直交行列で記述される点に注目します。
一般に直交変換は内積を不変に保つので、系に含まれるベクトルから作られるスカラーは、空間回転に対して不変となります。
ベクトルには向きがあるので、それをスカラー量にしなければ、その方向が特別な方向になってしまいます(空間の等方性に反します)!
具体的には、位置ベクトルと速度ベクトルが含まれるので、
\begin{align}
&\boldsymbol{r}_i(t)\cdot\boldsymbol{r}_j(t),\notag\\
&\dot{\boldsymbol{r}}_i(t)\cdot\dot{\boldsymbol{r}}_j(t),\notag\\
&\boldsymbol{r}_i(t)\cdot\dot{\boldsymbol{r}}_j(t)
\end{align}
という組み合わせは空間回転に対して不変です。
よって、系に空間回転対称性を課すことで、ラグランジアンは、
\begin{align}
L=L(\boldsymbol{r}_i(t)\cdot\boldsymbol{r}_j(t),\dot{\boldsymbol{r}}_i(t)\cdot\dot{\boldsymbol{r}}_j(t),\boldsymbol{r}_i(t)\cdot\dot{\boldsymbol{r}}_j(t),t)
\end{align}
の形まで制限されます。
Galilei 対称性
3 次元空間における \(N\) 質点系を考えます。
\(N\) 個の質点の位置ベクトルを \(\boldsymbol{r}_{i}(t)\) (\(i=1,2,\dots,N\)) とかきます。
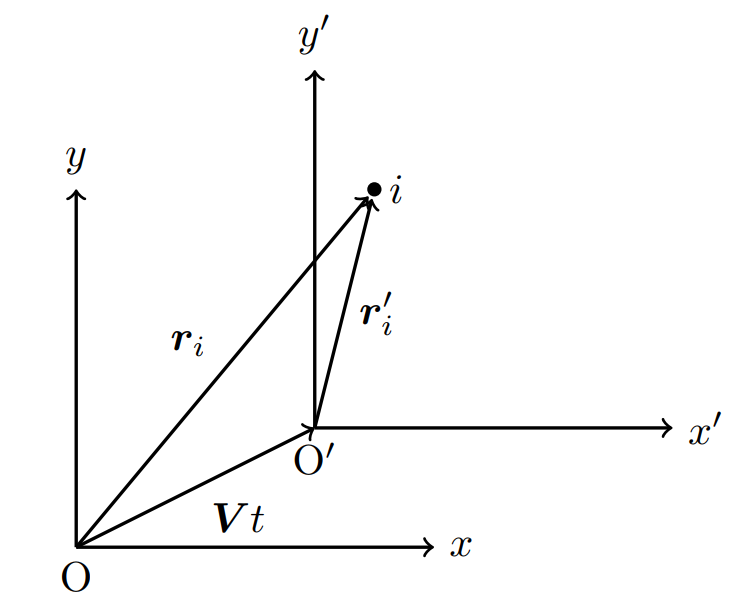
Galilei 変換
ある座標系 \(\mathrm{O}\) から、それに対して一定の速度 \(\boldsymbol{V}\) で運動する別の座標系 \(\mathrm{O}’\) へ移るような変換
\begin{align}
\boldsymbol{r}_{i}(t)\to\boldsymbol{r}’_{i}(t)=\boldsymbol{r}_{i}(t)-\boldsymbol{V}t
\end{align}
を Galilei 変換と言います。
Galilei 変換
Galilei 変換の前後で時間 \(t\) は変換しないことに注意しましょう
Galilei 変換によって結びついた 2 つの座標系の間で物理法則が変わらないことを、Galilei 対称性と言います。
ラグランジアン \(L(\boldsymbol{r}_i(t),\dot{\boldsymbol{r}}_i(t),t)\) をもつ \(N\) 質点系が Galilei 対称性をもつとは、Galilei 変換によって、ラグランジアンが
\begin{align}
L(\boldsymbol{r}’_i(t),\dot{\boldsymbol{r}}’_i(t),t)=L(\boldsymbol{r}_i(t),\dot{\boldsymbol{r}}_i(t),t)+\frac{d}{dt}F(\boldsymbol{r}_i(t),t)
\end{align}
と変換することを言います。
\(F(\boldsymbol{r}_i(t),t)\) は任意関数です。
Galilei 変換に対して、速度ベクトル \(\dot{\boldsymbol{r}}_i(t)\) は、
\begin{align}
\dot{\boldsymbol{r}}_i(t)\to\dot{\boldsymbol{r}}’_i(t)=\dot{\boldsymbol{r}}_i(t)-\boldsymbol{V}
\end{align}
と変換します。
よって、Galilei 対称性は、ラグランジアンが次の条件を満たすことです。
\begin{align}
L(\boldsymbol{r}_i(t)-\boldsymbol{V}t,\dot{\boldsymbol{r}}_i(t)-\boldsymbol{V},t)=L(\boldsymbol{r}_i(t),\dot{\boldsymbol{r}}_i(t),t)+\frac{d}{dt}F(\boldsymbol{r}_i(t),t;\boldsymbol{V}).
\label{galilei}
\end{align}
実際に、Galilei 変換に対してラグランジアンが \eqref{galilei} を満たすならば、\(\boldsymbol{r}_i(t)\) が Euler-Lagrange 方程式の解のとき、\(\boldsymbol{r}’_i(t)=\boldsymbol{r}_i(t)-\boldsymbol{V}t\) も解となることが示せます。
4 つの対称性を課すことによるラグランジアンの決定
これまでに、次の 4 つの対称性とラグランジアンの関係について議論しました。
- 時間並進対称性
- 空間並進対称性
- 空間回転対称性
- Galilei 対称性
最後に、これらの 4 つの対称性を満たすラグランジアンがどのような形になるのかを考えましょう。
結論としては、
自由粒子のラグランジアン \(L=\frac{1}{2}m\dot{\boldsymbol{r}}^2\) が得られます
ここでは、簡単のため、3 次元空間中を運動する 1 質点系を考えます。
その質点の位置ベクトルを \(\boldsymbol{r}(t)\) とします。
まず、時間並進対称性を課すと、ラグランジアンから陽な時間依存性がなくなり、
\begin{align}
L=L(\boldsymbol{r}(t),\dot{\boldsymbol{r}}(t))
\end{align}
となります。
次に、空間並進対称性を課すと、ラグランジアンが位置ベクトルには陽に依存せず、
\begin{align}
L=L(\dot{\boldsymbol{r}}(t))
\end{align}
となります。
さらに、空間回転対称性を課すと、ラグランジアンは速度ベクトルの内積の依存性をもつ必要があります。
\begin{align}
L=L(\dot{\boldsymbol{r}}(t)^2).
\end{align}
最後に、Galilei 対称性を課します。
これは言い換えると、任意の速度ベクトル \(\boldsymbol{V}\) に対して、
\begin{align}
L((\dot{\boldsymbol{r}}(t)-\boldsymbol{V})^2)=L(\dot{\boldsymbol{r}}(t)^2)+\frac{d}{dt}F(\boldsymbol{r}(t),t;\boldsymbol{V})
\label{eq10}
\end{align}
を満たす \(F(\boldsymbol{r}(t),t;\boldsymbol{V})\) が存在するということです。
\(|\boldsymbol{V}|\ll|\dot{\boldsymbol{r}}(t)|\) を仮定すると、\eqref{eq10} の左辺は次のように Taylor 展開されます。
\begin{align}
L((\dot{\boldsymbol{r}}(t)-\boldsymbol{V})^2)
=&L(\dot{\boldsymbol{r}}(t)^2-2\dot{\boldsymbol{r}}(t)\cdot\boldsymbol{V}-\boldsymbol{V}^2)\notag\\
=&L(\dot{\boldsymbol{r}}(t)^2)-2\dot{\boldsymbol{r}}(t)\cdot\boldsymbol{V}\frac{dL(\dot{\boldsymbol{r}}(t)^2)}{d\dot{\boldsymbol{r}}(t)^2}+\mathcal{O}(\boldsymbol{V}^2).
\label{eq11}
\end{align}
よって、\eqref{eq11} を \eqref{eq10} に代入すると、
\begin{align}
L(\dot{\boldsymbol{r}}(t)^2)-2\dot{\boldsymbol{r}}(t)\cdot\boldsymbol{V}\frac{dL(\dot{\boldsymbol{r}}(t)^2)}{d\dot{\boldsymbol{r}}(t)^2}+\mathcal{O}(\boldsymbol{V}^2)
=L(\dot{\boldsymbol{r}}(t)^2)+\frac{d}{dt}F(\boldsymbol{r}(t),t;\boldsymbol{V})
\label{eq12}
\end{align}
となります。
したがって、
\begin{align}
-2\dot{\boldsymbol{r}}(t)\cdot\boldsymbol{V}\frac{dL(\dot{\boldsymbol{r}}(t)^2)}{d\dot{\boldsymbol{r}}(t)^2}+\mathcal{O}(\boldsymbol{V}^2)
=\frac{d}{dt}F(\boldsymbol{r}(t),t;\boldsymbol{V}).
\label{eq13}
\end{align}
この右辺は、\(\boldsymbol{r}(t)\) に依存する(その時間についての微分には依存しない)関数 \(F(\boldsymbol{r}(t),t;\boldsymbol{V})\) を時間について 1 階だけ微分したものなので、\(\dot{\boldsymbol{r}}(t)\) について高々 1 次です。
よって、\eqref{eq13} が成り立つ \(F(\boldsymbol{r}(t),t;\boldsymbol{V})\) が存在するためには、
\begin{align}
\frac{dL(\dot{\boldsymbol{r}}(t)^2)}{d\dot{\boldsymbol{r}}(t)^2}
=\mathrm{const.}
\label{eq14}
\end{align}
である必要があります。
この定数を \(m/2\) とおくと、
\begin{align}
\frac{dL(\dot{\boldsymbol{r}}(t)^2)}{d\dot{\boldsymbol{r}}(t)^2}
=\frac{m}{2}.
\label{eq15}
\end{align}
これを \(\dot{\boldsymbol{r}}(t)^2\) について積分すると、
\begin{align}
L(\dot{\boldsymbol{r}}(t)^2)
=\frac{m}{2}\dot{\boldsymbol{r}}(t)^2
\label{eq16}
\end{align}
が得られます。
このとき、\(F(\boldsymbol{r}(t),t;\boldsymbol{V})\) は、
\begin{align}
F(\boldsymbol{r}(t),t;\boldsymbol{V})
=-m\boldsymbol{r}(t)\cdot\boldsymbol{V}+\mathcal{O}(\boldsymbol{V}^2)
\end{align}
となります。
このようにして、\(|\boldsymbol{V}|\ll|\dot{\boldsymbol{r}}(t)|\) の仮定の下で、
自由粒子のラグランジアン \(L=\frac{1}{2}m\dot{\boldsymbol{r}}^2\) が得られました!
あとは \(|\boldsymbol{V}|\ll|\dot{\boldsymbol{r}}(t)|\) という仮定を外せれば、任意の \(\boldsymbol{V}\) に対して、\eqref{eq16} が示されます。
\eqref{eq16} の \(L\) を用いると、
\begin{align}
L((\dot{\boldsymbol{r}}(t)-\boldsymbol{V})^2)-L(\dot{\boldsymbol{r}}(t)^2)
=&\frac{m}{2}(\dot{\boldsymbol{r}}(t)-\boldsymbol{V})^2-\frac{m}{2}\dot{\boldsymbol{r}}(t)^2\notag\\
=&\frac{m}{2}(\dot{\boldsymbol{r}}(t)^2-2\dot{\boldsymbol{r}}(t)\cdot\boldsymbol{V}+\boldsymbol{V}^2)-\frac{m}{2}\dot{\boldsymbol{r}}(t)^2\notag\\
=&\frac{m}{2}(-2\dot{\boldsymbol{r}}(t)\cdot\boldsymbol{V}+\boldsymbol{V}^2)\notag\\
=&\frac{d}{dt}\left[m\left(-\boldsymbol{r}(t)\cdot\boldsymbol{V}+\frac{1}{2}\boldsymbol{V}^2t\right)\right]
\end{align}
のように時間についての全微分項となります。
これは任意の \(\boldsymbol{V}\) に対して成立します。
よって、時間並進対称性・空間並進対称性・空間回転対称性・Galilei 対称性の 4 つを課すことで、
自由粒子のラグランジアン \(L=\frac{1}{2}m\dot{\boldsymbol{r}}^2\) が得られました!